.jpg?1706001643 "Delta Optical")

15 kilogramów stali – a to tylko mowa o statywie z nogami o średnicy prawie 3 cali. Na to 15 kilogramów metalu i elektroniki w postaci głowicy. Do tego 2.5 kg pręt przeciwwagi i dwa ciężarki po 10 kilogramów każdy. I na to wszystko jeszcze można zapakować 35 kilogramów teleskopów. W sumie ponad 85 kilogramów astronomicznego szczęścia.
 |
 |
Tak się w skrócie prezentuje montaż Sky Watcher CQ350 Pro, który dzięki firmie Delta-Optical mam okazję testować. Producent montażu w ten sposób wypełnił lukę pomiędzy urządzeniami klasy EQ6 o nośności 15-20 kg i montażem EQ8 o nośności 50kg, ale którego sama głowica waży 25kg.
Sky Watcher przy okazji zdecydował się na popularną obecnie konstrukcję “center balanced”, dzięki czemu głowica wciąż zachowała kulturalną wagę własną. Bo te 15kg choć brzmi poważnie, to jednak tyle samo ważą głowice montaży EQ6 czy NEQ6. Jest to słodki ciężar, który jak najbardziej jesteśmy w stanie sami umieścić na trójnogu, a następnie dołożyć na górze posiadane przez nas łapacze fotonów.

A co w środku?
Obie osie napędzane są silnikami krokowymi z przekładnią paskową. Oś RA posiada ślimacznicę zaopatrzoną w 308 zębów o średnicy 155mm. Oś Dec jest trochę mniej doposażona, bo dysponuje jedynie 288 zębami. Rozdzielczość w RA to 0.023 sekundy kątowej. Montaż wymaga zasilania 11-16V DC o wydajności prądowej 5A.
Codzienną pracę ułatwiają czujniki pozycji startowej umieszczone na obu osiach, dzięki czemu montaż może ją odnaleźć sam. Proces ten możemy uruchomić zarówno z pilota SynScan jak i z dedykowanej aplikacji, a również popularny wśród amatorów sterownik GS Server pozwala na tę operację.
Fotografów na pewno ucieszy obecność PPEC - czyli korekcji błędu okresowego możliwa do zapisania na stałe w pamięci montażu. W przypadku CQ-350 PPEC ma rozdzielczość 200 pozycji.
Miłośnikom porządku na pewno przypadnie do gustu pęk kabli poprowadzony wewnątrz montażu, dzięki czemu zasilanie, połączenia USB czy też kabelki RJ możemy podłączyć do głowicy montażu, a ich wyjście znajdziemy pod siodełkiem, skąd wygodnie odprowadzimy je dalej do zestawu obserwacyjnego.
Standardowo w zestawie nie ma lunetki biegunowej - takową musimy kupić dodatkowo. Ale dokładne ustawienie na biegun możliwe jest z poziomu pilota SynScan po uprzednim wyrównaniu na 2 lub 3 gwiazdy. Jest też coraz więcej programów, które pozwalają na precyzyjne wyrównanie na biegun przy użyciu plate-solve (np. SharpCap czy Ekos).
Składanie całości w działający zestaw nie jest zbyt uciążliwe i nie trwa długo. Trójnóg posiada wbudowaną poziomicę. Płyta montażowa jest płaska i posiada podkładki z twardego i śliskiego tworzywa sztucznego, prawdopodobnie polipropylenu. Umieszczenie głowicy na trójnogu nie sprawia problemów, potem bierzemy cztery śrubki - dwoma blokujemy głowicę do trójnogu, a kolejne dwie mocują pręt przeciwwagi. Pręt możemy umieścić pod dwoma różnymi kątami w zależności od szerokości geograficznej naszej miejscówki. Potem ciężarki, zasilanie, teleskop i możemy zacząć obserwacje. Siodełko standardowo umożliwia zamontowanie teleskopu na szynie Vixen lub Losmandy, a do jej blokowania służą dwa solidne pokrętła.
 |
|
Śruby do ustawiania azymutu i elewacji są wygodne w obsłudze, ale po ustawieniu warto położenie głowicy zablokować dokręcając odpowiednie śrubki zaciskowe.
Dźwignie sprzęgieł posiadają koronki blokujące. Wydawało mi się to na początku zbędnym gadżetem, ale jak sobie uświadomiłem jakie może mieć skutki przypadkowe rozsprzęglenie zestawu z 35kg teleskopem, to w sumie te blokady zaczęły mi się bardzo podobać.
No ale życie to nie bajka, i nie wszystko jest idealnie oczywiście.
To co najmniej mi się spodobało to wyprowadzenie kabli na czoło głowicy od strony pręta przeciwwagi. W konstrukcji “center balanced” kable wychodzą z ruchomej części głowicy - no trudno, taki urok tego rozwiązania. Ale wszystkie te gniazdka można by umieścić na tylnej części obudowy, gdzie na pewno sprawiałyby mniej problemów z prowadzeniem podłączonych do nich kabli. Na przodzie niestety obracają się one po znacznym promieniu wraz z głowicą, a dodatkowo obecność pręta przeciwwagi wymagać będzie od użytkownika trochę uwagi przy prowadzeniu kabli.
Natomiast niewątpliwie sama ilość kabli poprowadzonych wewnątrz montażu jest satysfakcjonująca. Na panelu czołowym mamy standardowe gniazdo zasilania, diodę LED, gniazdo USB do sterowania montażem z komputera, oraz gniazdka RJ do podłączenia pilota SynScan i guidowania. Kompletu dopełnia gniazdko SNAP do wyzwalania migawki aparatu.
Z boku panelu mamy gniazdka połączone kablami wewnątrz montażu z odpowiednikami umieszczonymi na siodełku. Jest wejście zasilania 6-24V, które jest rozdzielone na trzy wyjścia pod siodełkiem. Ich sumaryczna obciążalność to 5A. To samo napięcie zasila również aktywny hub USB3.0, a cztery porty USB mamy również dostępne pod siodełkiem. Dodatkowo są trzy gniazdka RJ - 4, 6 i 8 pinowe, które po drugiej stronie dostępne są z boku siodełka. Obciążalność pinów gniazdek RJ to 0.5A. Możemy więc sobie rozplanować kabelkologię zestawu z użyciem tych przelotek. Z drugiej strony przy takiej obciążalności montażu na tubie teleskopu bez problemu możemy zamocować mały albo średni komputer, który będzie nam całością zestawu sterował i wtedy większość kabli będzie poprowadzona bezpośrednio z niego do komponentów zestawu.
 |
 |
Pierwsze uruchomienie montażu przebiegło bez zakłóceń. Po włączeniu zasilania pilot SynScan przywitał typowymi pytaniami o położenie obserwatora, datę, godzinę, strefę czasową i czas letni. Następnie zaproponował znalezienie pozycji startowej na co się zgodziłem i po paru chwilach bzyczenia montaż zatrzymał się w wyznaczonej pozycji. Kolejne pytanie było już bardziej kłopotliwe - chodziło o “DEC offset”. Domyślałem się co to może znaczyć, ale upewniłem się w instrukcji. W przypadku kiedy chcemy używać podwójnego siodełka, niektóre z nich wymagają obrócenia osi Dec o 90 stopni, ponieważ osie zamontowanych teleskopów są prostopadłe do głównej szyny montażowej. Tutaj pojawia się potencjalny problem związany z blokerami osi Dec. Ponieważ wewnątrz montażu poprowadzone są kable, więc oś Dec nie umożliwia obrotu o 360 stopni, żeby nie ukręcić kabli. Zastosowano w niej mechaniczne stopery, które ograniczają jej ruch w zakresie około 150 stopni w obu kierunkach. Dlatego niemożliwe jest użycie podwójnego siodełka wymagającego obrócenia osi Dec o 90 stopni, ponieważ wtedy ruch w jednym z kierunków będzie ograniczony do około 60 stopni przez mechaniczny bloker. W drugą stronę będziemy mogli kręcić o 240 stopni, ale to w niczym nie pomaga. Dlatego jeśli chcemy zastosować szynę z podwójnym siodełkiem w CQ-350 musimy szukać rozwiązań, w którym szyna główna jest równoległa do osi mocowanych teleskopów. Z tego też powodu według mnie opcja “DEC offset” powinna być zablokowana w tym modelu montażu.
Zachowawczo więc wybrałem “DEC offset” jako zero i następnie napotkałem w pilocie możliwość wyrównania na 1, 2 lub 3 gwiazdy. Po wyrównaniu na 2 lub 3 gwiazdy dodatkowo pojawia się możliwość dokładnego ustawienia montażu na biegun.
Przetestowałem również kontrolę montażu z komputera za pomocą kabla USB oraz sterownika GS Server. Po wybraniu w opcjach połączenia odpowiedniego portu szeregowego oraz szybkości 115200 bez problemu udało się z montażem dogadać i sterować nim z komputera.
Silniki krokowe montażu chodzą nie całkiem cicho, ale kulturalnie. Przyspieszenie jest płynne, nie następuje skokowa zmiana szybkości silnika podczas rozpędzania. Obciążenie CQ-350 za pomocą teleskopu SCT8 nie jest oczywiście adekwatne do jego natury i ledwo mi starczyło pręta przeciwwagi, żeby zrównoważyć ten teleskop. Ledwo starczyło z krótszej strony znaczy się.
 |
 |
Ze względu na nieustępliwe chmury na takich suchych testach zakończyłem pierwszą sesję z CQ-350 Pro.Teraz czekamy na trochę nocnej pogody i po większym dociążeniu montażu mam nadzieję przekonać się jak bardzo bym go chciał w mojej szopce.
No i jeszcze do przetestowania będzie współpraca z telefonem przez moduł WiFi. Sterowanie takim misiem z komórki na pewno będzie atrakcją samą w sobie.

Trochę czasu musiało upłynąć zanim przewalające się fronty atmosferyczne uzgodniły z moim wolnym czasem termin na dwa wieczory, w czasie których mogłem zebrać trochę materiału z użyciem CQ350. Mocno dający po oczach Księżyc nie dawał zbyt wielkiego wyboru wśród obiektów wiosennego nieba. Na pierwszy ogień poszło centrum Woźnicy z mgławicami Płomień i Kijanki - oczywiście przez filtr Ha.

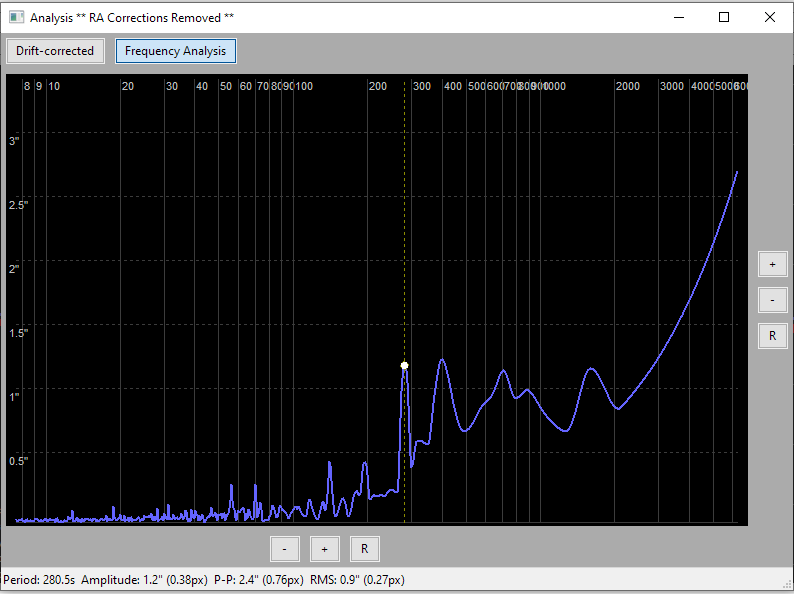
Ale zanim materiał został zebrany, wyznaczyłem błąd okresowy montażu. Ze względu na spore przełożenie głównej przekładni w osi RA, okres obrotu ślimaka w CQ350 wynosi zaledwie 280 sekund, a błąd okresowy wyznaczony przez Asystenta Guidingu w PHD2 wyniósł +-3 sekundy łuku - całkiem dobry wynik.
Średni sumaryczny błąd prowadzenia z sesji to 0.76”, a na podglądzie analizy korekt możemy zauważyć, że największy wkład mają poprawki korygujące błąd właśnie o okresie 280s od pełnego cyklu ślimaka, ale także o okresie 400s - może to wynikać ze stopnia przełożenia przekładni pasowej ślimaka w osi RA.
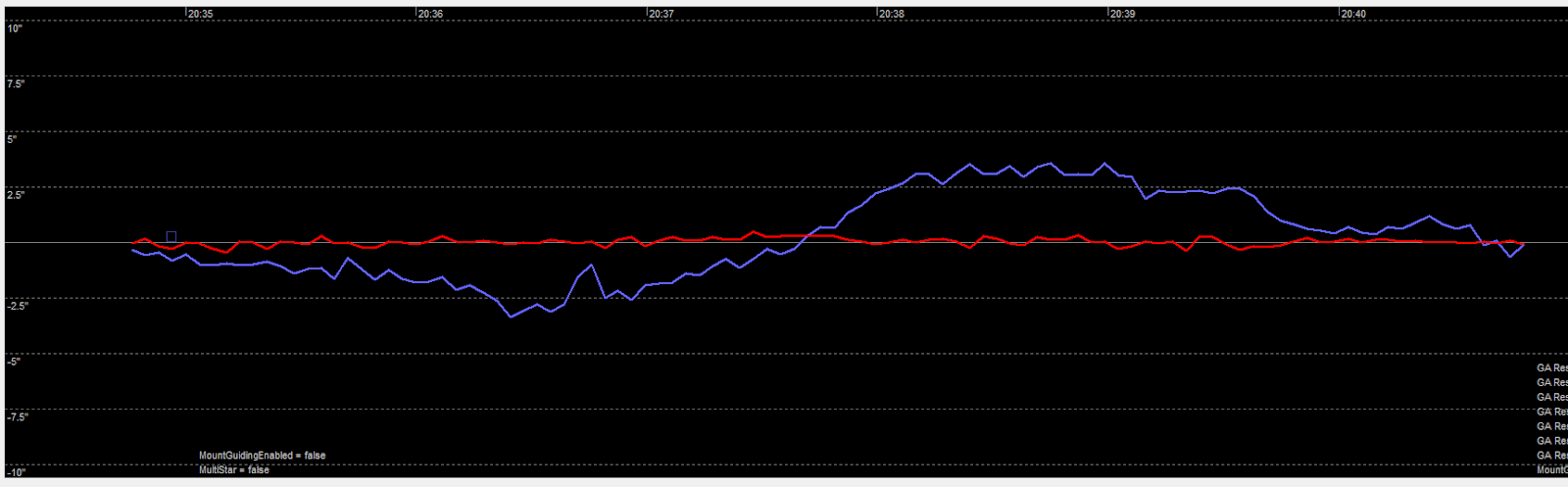
Również gdy spojrzymy na pełny log z sesji fotograficznej można zauważyć, że korekty nie są całkiem losowe, ale układają się w pewne cykle. Takiemu zachowaniu na pewno udałoby się zaradzić nagrywając do montażu krzywą PPEC. Niestety nie udało mi się uruchomić nagrywania tej krzywej. Uruchamianie z poziomu pilota nic nie dawało, a zarówno aplikacja SynScan jak i GS Server pokazywały, że PPEC Training nie jest dostępny. Możliwe że to kwestia oprogramowania i wkrótce ukażą się nowsze wersje, które pozwolą na nagranie PPEC i poprawę jakości śledzenia. Przy tak niewielkim błędzie okresowym o stosunkowo łagodnym przebiegu PPEC powinien dać wymierne korzyści.
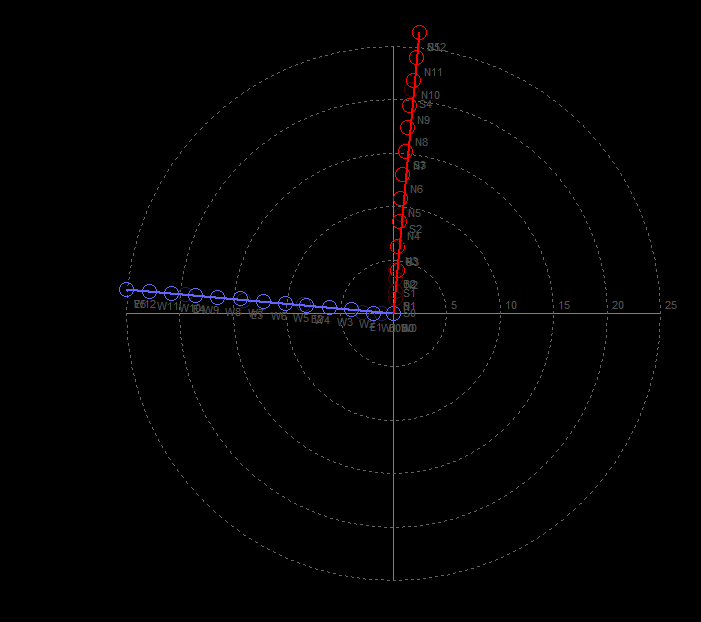
Sama kalibracja guidingu w PHD2 przebiegła praktycznie wzorowo, a pełne wyniki z Asystenta Guidingu pokazane są poniżej:
 |
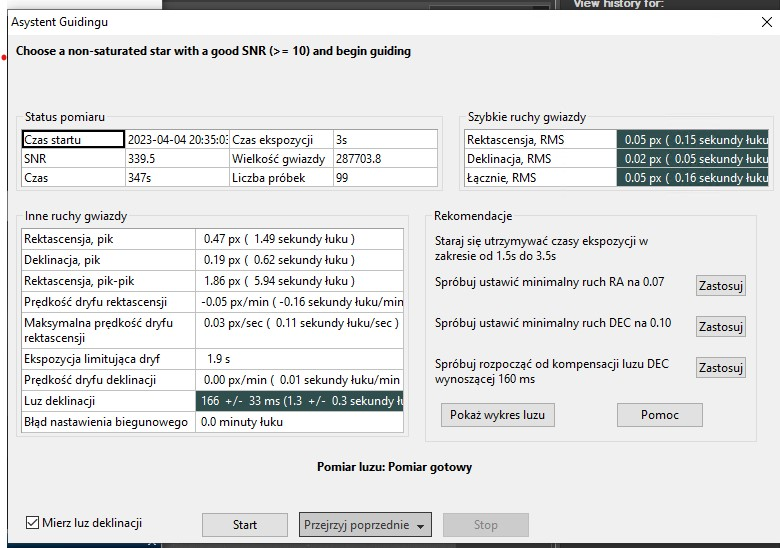 |
Montaż został ustawiony na biegun za pomocą programu SharpCap z błędem poniżej 0.1 minuty. Wyniki uzyskane przez montaż (prędkości dryfu oraz PE) są bardzo dobre, a również wyznaczony luz w deklinacji nie będzie stanowił problemu podczas guidowania i szybkiej stabilizacji montażu po operacji ditheringu.
Po Woźnicy czasu starczyło jeszcze na szybką Meduzę - również przez filtr Ha. Tym razem udało się zebrać 50 klatek po 3 minuty.

Następnej nocy pomimo szalejącego Księżyca postanowiłem zebrać trochę luminancji i skierowałem teleskop z montażem na duet M81 i M82. Zebrane 20 klatek po 2 minuty prezentuje się tak jak poniżej (to powiększony wycinek pełnego kadru):

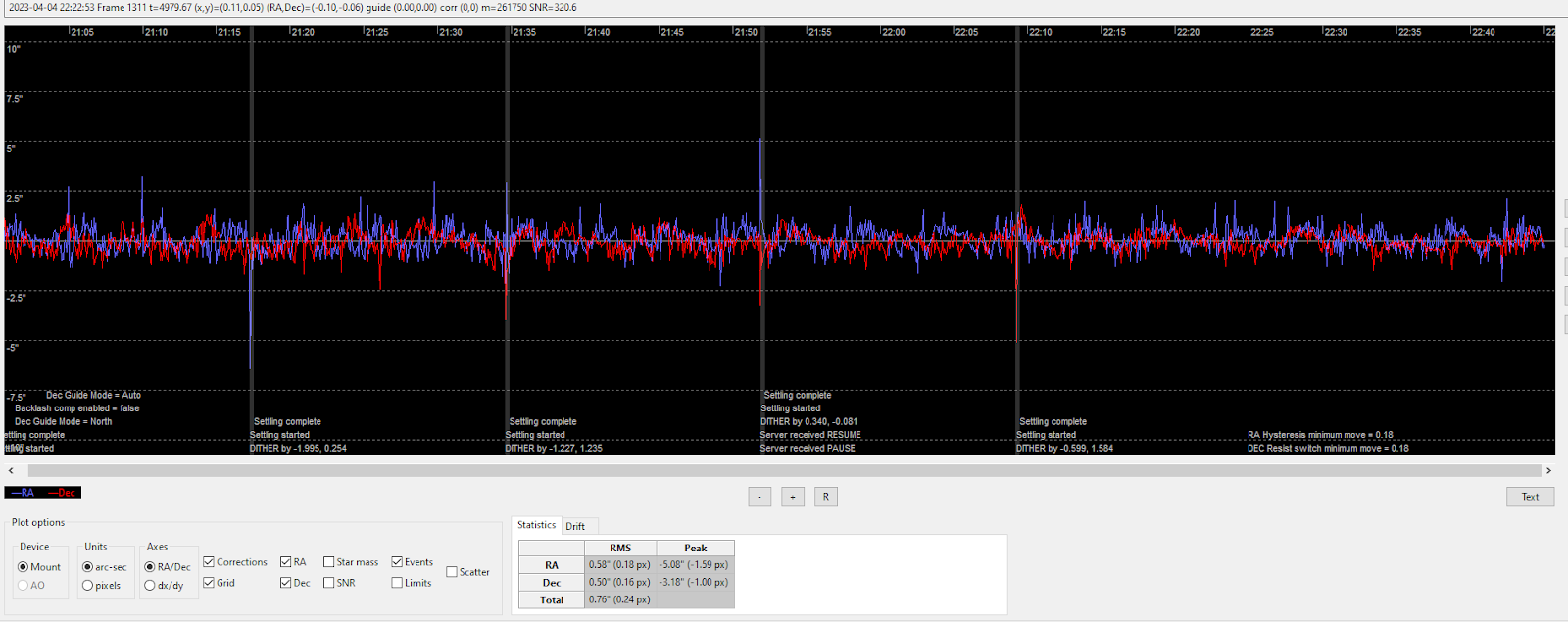
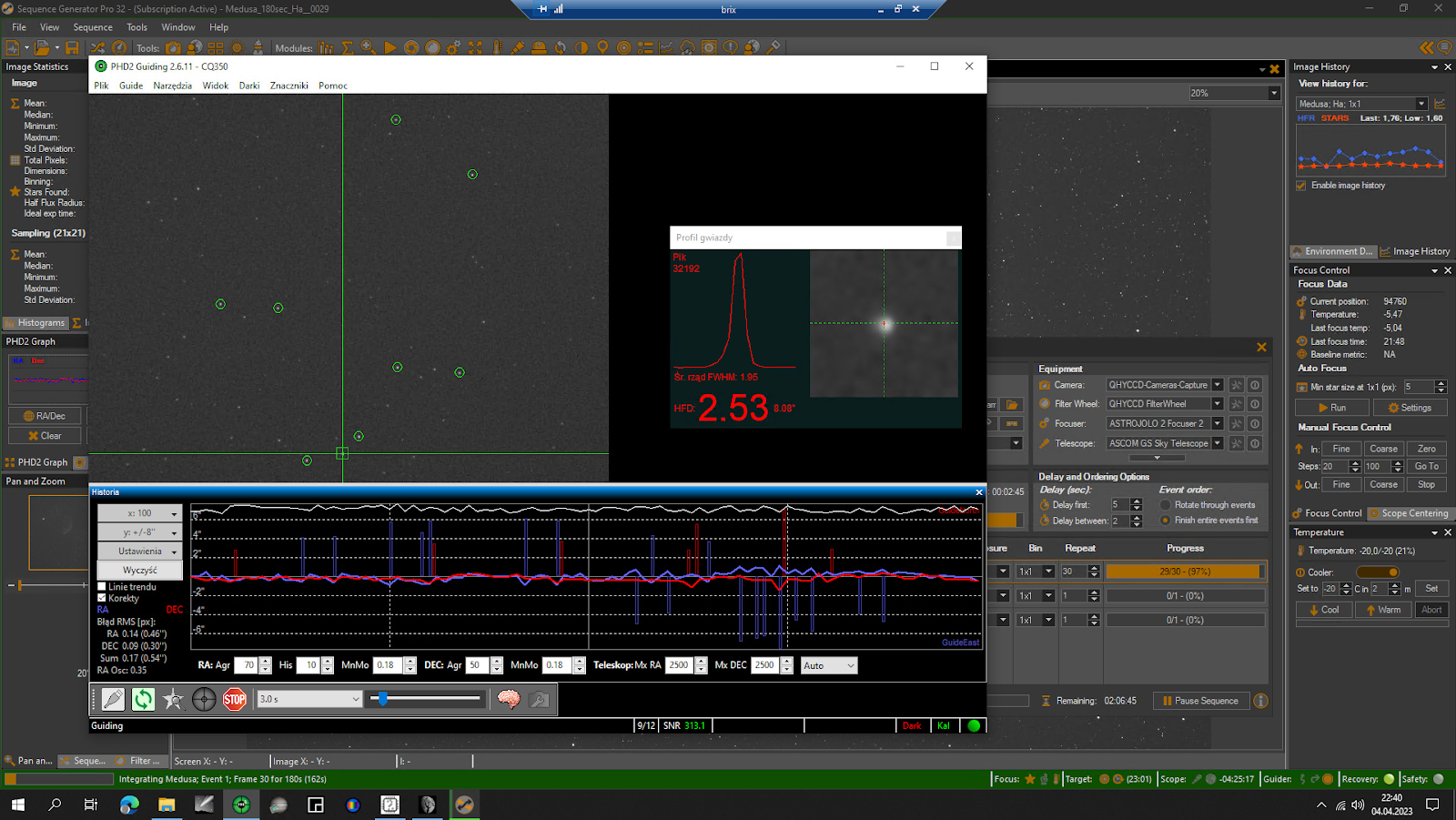
Dokładność prowadzenia montażu podczas drugiej sesji była podobna - w okolicach 0.7-0.8”. Zdarzały się okresy, kiedy schodziła w pobliże 0.5”, tak jak na przykład na zrzucie poniżej:
Na taki sumaryczny błąd prowadzenia montażu składa się szereg czynników. Oprócz samych błędów pochodzenia mechanicznego na jakość guidingu wpływa też oczywiście seeing. Warunki atmosferyczne podczas obu sesji były dość mieszane, a seeing był zmienny. Podejrzewam że w dobrych warunkach, kiedy atmosfera będzie stabilna, CQ350 będzie w stanie pracować z dokładnością raczej w okolicach właśnie 0.5”, a nie 0.7-0.8. Dodatkowo opcja nagrania PPEC powinna ten wynik jeszcze poprawić - miejmy nadzieję, że jak najszybciej stanie się ona dostępna.
I po tych dwóch nockach pogoda znowu powiedziała stanowczo “nie” na dłużej i montaż już nie miał okazji się ponownie wykazać. Ze względu na niedomagającą pogodę mam trochę niedosytu po testach CQ350, bo mam mocne wrażenie, że stać go na więcej. Ale póki co cyfry są jakie są i nie ma co z nimi dyskutować. Można zapytać - czy błąd guidingu 0.7” to dużo czy mało? Przede wszystkim trzeba pamiętać, że ten błąd pochodzi nie tylko z montażu. W jego skład wchodzi też błąd wyznaczenia położenia gwiazdy w guiderze. Jeśli gwiazdki w guiderze mają średnicę 10-15 albo więcej sekund kątowych, to nie ma co oczekiwać, że taki guider będzie w stanie dokładnie prowadzić montaż klasy CQ350. Podczas testów montażu guiding był prowadzony zarówno przez guider Evoguide 50ED jak i przez główny refraktor i błąd był porównywalny, dlatego w tym przypadku parametry guidera były wystarczające.
Druga sprawa to nasz krajowy klimat. Przy klasycznej fotografii długoczasowej rzadko kiedy zdarza się u nas seeing na poziomie 2” albo lepiej. Zazwyczaj oscyluje w oklicach 2.5” i taki też jest średni rozmiar gwiazd. Dlatego guiding z błędem na poziomie 0.7” nie będzie dla nas wąskim gardłem - ponieważ sumaryczny rozmiar gwiazdy nie jest zwykłą sumą rozmiaru kątowego i błędu prowadzenia, ale w przybliżeniu pierwiastkiem sumy kwadratów (brzmi okropnie, ale łatwo to obliczyć).
Jak to zwykle bywa pochmurne noce z CQ350 odpoczywającym w domu dłużyły się strasznie, a z kolei te kilka godzin pogody minęły błyskawicznie. Tak czy siak, czas już się rozstać z montażem i zregenerować plecy, bo wystawianie w każde możliwe okienko pogodowe około 60 kilogramów sprzętu po pewnym czasie już nie było taką frajdą, jak na początku 🙂
Co mi się spodobało w CQ350?
- rozsądna waga głowicy przy nośności 35kg
- dobre rozwiązania mechaniczne do ustawiania głowicy na biegun
- blokady sprzęgieł osi RA i Dec
- kable poprowadzone wewnątrz montażu do siodełka - wraz z aktywnym hubem USB3.0
- masywny statyw
- mały błąd okresowy
- dobre prowadzenie (ale może być lepiej)
Co mi się podobało mniej?
- gniazda wejściowe wyprowadzone na czoło głowicy od strony przeciwwagi
- braki w oprogramowaniu (DEC offset który nie może być stosowany w CQ350 ze względu na blokady mechaniczne, brak możliwości nagrania PPEC)
- szeroko rozstawiony statyw w połączeniu z głowicą “center balanced” może sprawiać kłopoty przy celowaniu w okolice zenitu - tylna część teleskopu może zahaczać o nogi statywu

Testy przeprowadził:
Łukasz Socha



